Nueva estrategia para optimizar los sistemas de control
La gran evolución que los sistemas de control han tenido en los últimos años, ha traído consigo la necesidad de hacer un control más preciso, teniendo en cuenta todas las situaciones posibles que se puedan presentar. Dentro de estas posibilidades, el desempeño del sistema de control -así como la robustez- se deben considerar como atributos importantes, que todos los lazos de control tienen que tener en cuenta.
Desde el punto de vista del rendimiento, considerando los dos posibles modos de operación para el sistema, los requerimientos deben incluir un buen rechazo de perturbaciones (control regulatorio) y un buen seguimiento de la consigna (servo control), lo que representa por sí mismo, un compromiso entre ambas consideraciones.
Por otra parte, si miramos desde el punto de vista de la robustez del sistema, debido a las variaciones del proceso este es un aspecto muy importante que debe incluirse explícitamente en la fase de diseño del controlador. Sin embargo, el cumplimiento de las especificaciones correspondientes a la robustez no siempre se verifica, provocando esto que se afecte la relación existente entre rendimiento y robustez.
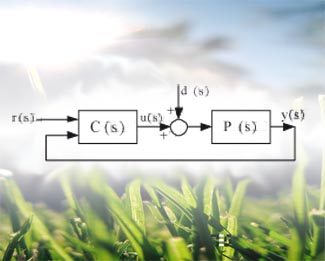
Esta tesis presenta un enfoque que enfrenta un problema que incluye las consideraciones descritas anteriormente. El objetivo es aportar soluciones para mejorar el comportamiento general de un sistema de control, que utilice una estructura de controlador tipo Proporcional-Integral-Derivativo(PID), con Un-Grado-de-Libertad (1-GdL).
La propuesta se enfoca desde dos puntos de vista. En la primera parte, el análisis se realizó desde la perspectiva del modo de funcionamiento (ya sea servo o modo de regulación) del lazo de control y el modo de sintonía del controlador. Cuando el modo de operación es diferente del seleccionado para el ajuste, el rendimiento de la regla de sintonía óptima puede degradarse. Es evidente que ambas situaciones pueden estar presentes en cualquier sistema de control y en este contexto, se ofrece un enfoque general para el control de servo/regulatorio, que mejore el rendimiento global en ambos modos de operación. La solución propuesta es formulada a partir de los parámetros óptimos del controlador, para sintonías de servo y de regulación, y buscando una sintonía intermedia entre ambos conjuntos.
Considerando la importancia de la robustez, en la segunda parte el propósito es diseñar una estrategia de control que no dependa de las sintonías extremas (para servo y regulación), y que incluya además consideraciones de robustez, de manera explícita. Por lo tanto, se formula un índice combinado para servo/regulación, que evalúe el rendimiento del sistema, incorporando una restricción de robustez. El cumplimiento de la robustez resultante respecto a la seleccionada es verificado, brindando por tanto el controlador PID un buen rendimiento y además un determinado y preciso grado de robustez.
Los resultados conducen a una serie de reglas de sintonía para el PID, que utilizan la robustez
o la degradación del rendimiento, como parámetros de diseño. En ambos casos, el objetivo es cumplir el valor escogido para el diseño, proporcionando, tanto como sea posible, el mejor valor para la otra característica (robustez o rendimiento, dependiendo del caso).
Como una de las principales aportaciones, se presenta una sintonía PID balanceada para rendimiento/robustez, que busca el mejor compromiso entre el incremento de la robustez y la consiguiente pérdida en el grado de optimalidad respecto al rendimiento.
Referencias
"PID Control. Servo/regulation performance and robustness issues". Tesis doctoral defendida por Orlando Arrieta Orozco, en septiembre de 2010. Dirigida por el Dr. Ramon Vilanova Arbós.