Model predictiu per a la millora de la gestió de les flotes de vehicles elèctrics
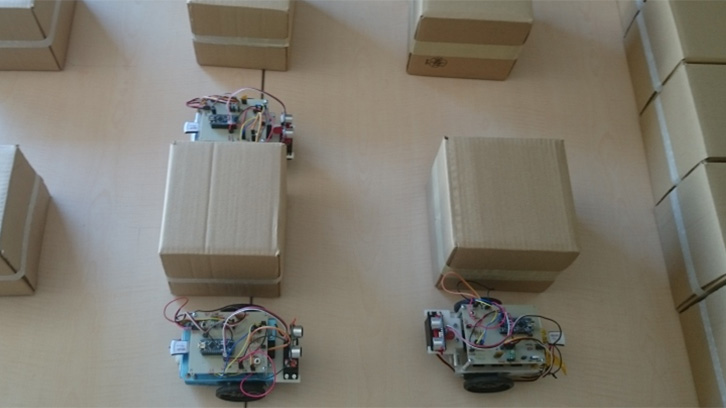
Les fàbriques i els magatzems d’avui en dia tenen un trànsit intern que cada cop s’assembla més al de les ciutats i solen tenir una flota de taxis que efectuen transports d’un punt a un altre d’una manera autònoma. Són els que es denominen ‘vehicles guiats automàticament’ o AGV, de les sigles en anglès.
L’avantatge és que un sistema de transport així pot adaptar-se a les necessitats de cada moment, sense que calgui cap control central. Per exemple, subhastant les ordres de transport entre els vehicles disponibles per assignar-les al millor postor, és a dir, al que pugui portar el material del punt de recollida al de destinació amb el menor cost possible.
Com que els AGV solen funcionar amb bateries i com que la càrrega de les bateries influeix significativament en la velocitat que poden prendre, el temps que triguen en fer un transport no només depèn de la distància a recórrer sinó que també ho fa de l’energia disponible.
En aquest treball s’ha creat una planta experimental a escala per estudiar la relació entre la càrrega de les bateries i el temps per efectuar un transport. El model que s’ha creat a partir d’aquest estudi permet preveure la despesa energètica i estimar el temps de cada operació de manera més acurada que amb els models purament teòrics o amb els heurístics. Els resultats experimentals indiquen que els costos d’operació poden diferir fins a un 25% segons com es calculin. Consegüentment, l’ús del nou model permet millorar la planificació de les rutes per optimitzar tant el temps de servei de cada transport com la gestió de les bateries.
Aquest model es pot estendre a tota una flota de vehicles elèctrics per augmentar la fiabilitat de les prediccions i aconseguir millorar l’eficiència del conjunt, especialment dins les fàbriques i magatzems, però també podria aplicar-se als vehicles que es mouen en els entorns urbans.
Departament de Microelectrònica i de Sistemes Electrònics
Universitat Autònoma de Barcelona
Referències
Pragna Das, Lluís Ribas-Xirgo. A Study of Time-varying Cost Parameter Estimation Methods in Automated Transportation Systems based on Mobile Robots. 21st IEEE International Conference on Emerging Technology and Factory Automation. September 2016 DOI: 10.1109/ETFA.2016.7733679