

Modelo predictivo para la mejora de la gestión de las flotas de vehículos eléctricos
Las fábricas y los almacenes de hoy en día tienen un tráfico interno que cada vez se asemeja más al de las ciudades y suelen tener una flota de taxis que efectúan transportes de un punto a otro de una manera autónoma. Son los que se denominan ‘vehículos guiados automáticamente’ o AGV, de sus siglas en inglés.
La ventaja es que un sistema de transporte así puede adaptarse a las necesidades de cada momento, sin que haga falta ningún control central. Por ejemplo, subastando las órdenes de transporte entre los vehículos disponibles para asignarlas al mejor postor, es decir, al que pueda llevar el material del punto de recogida al de destino con el menor coste posible.
Habitualmente, los AGV suelen funcionar con baterías y, teniendo en cuenta que la carga de las baterías influye significativamente en la velocidad que pueden desarrollar, el tiempo que tardan al hacer un transporte no sólo depende de la distancia a recorrer sino que también lo hace de la energía disponible.
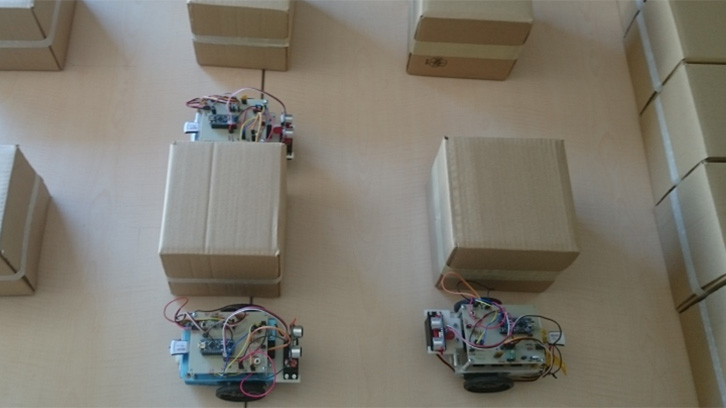
En este trabajo se ha creado una planta experimental a escala para estudiar la relación entre la carga de las baterías y el tiempo para efectuar un transporte. El modelo que se ha creado a partir de este estudio permite prever el gasto energético y estimar el tiempo de cada operación de manera más realista que con los modelos puramente teóricos o con los heurísticos. Los resultados experimentales indican que los costes de operación pueden diferir hasta un 25% según cómo se calculen. Así pues, el uso del nuevo modelo permite mejorar la planificación de las rutas para optimizar tanto el tiempo de servicio de cada transporte como la gestión de las baterías.
Este modelo se puede extender a toda una flota de vehículos eléctricos para aumentar la fiabilidad de las predicciones y conseguir mejorar la eficiencia del conjunto, especialmente dentro de las fábricas y almacenes, pero también podría aplicarse a los vehículos que se mueven en los entornos urbanos.
Departamento de Microelectrónica y Sistemas Electrónicos
Universitat Autònoma de Barcelona
Referencias
Pragna Das, Lluís Ribas-Xirgo. A Study of Time-varying Cost Parameter Estimation Methods in Automated Transportation Systems based on Mobile Robots. 21st IEEE International Conference on Emerging Technology and Factory Automation. September 2016 DOI: 10.1109/ETFA.2016.7733679
